





Application
- Automaticcontrol, control of transport vechincles,robot,X-Y labor,printing,fork truck,CNC tooling machine and etc.
-
Solid shaft rotary encoders are used in many applicaions that reauire precise shat unlimited rotaion-incuding industrial controls. robotics. Specia purpose photographic lenses,computer input devices (such as optomechanical mice and trackballs), controlled stress rheometers, and rotating radar platforms.
Features
- High reliability,long life, strong anti-interference ability.
- 2 quadrature output channel(A&B)+index signal
- Square flange be used in numerical control machine
-
A Solid-Shaft Rotary Encoder, also called a solid shaft encoder, is an electro-mechanical device that converis the angular position or motion of a shaf or axleto an analog or digital code.
There are two main types: absolute and incremental (relative). The output of absolute encoders indicates the curent position of the shaftmaking them angle transducers. The output of incremental encoders provides information about the motion of the shaf, which is typically further processed elsewhere into information such as speed, distance and position.

Produact information
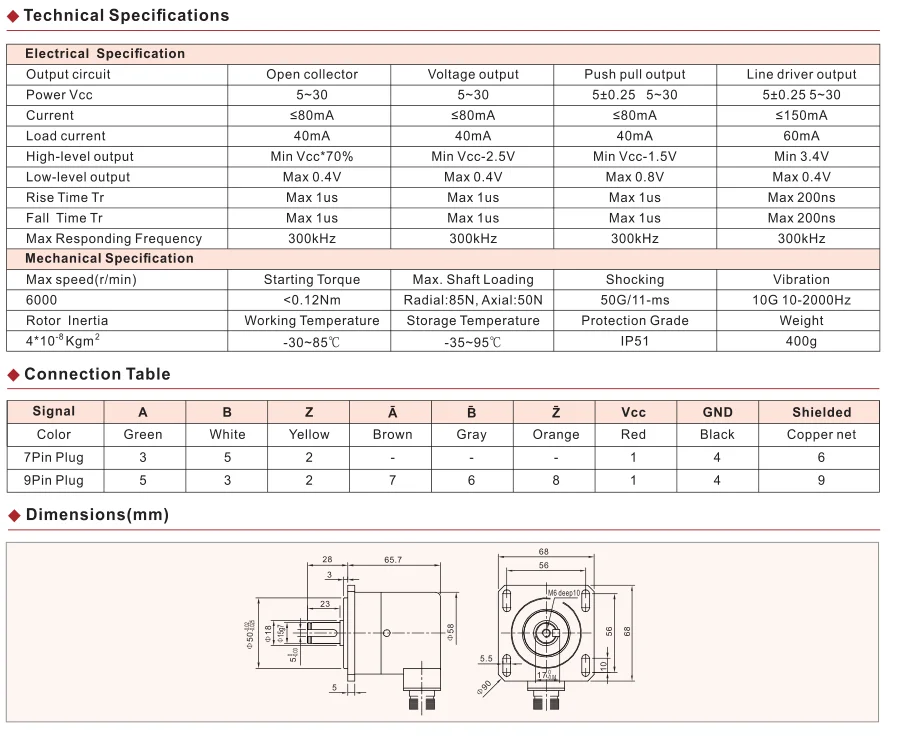
Output circuit
Open collector
Voltage output
Push pull output
Line driver output
Power Vcc
5-30
5-30
5+0.25 5-30
5+0.25 5-30
Current
≤80mA
≤80mA
≤80mA
≤150mA
Load current
40mA
40mA
40mA
60mA
High-level output
Min Vcc70%
Min Vcc-2.5V
Min Vcc-1.5V
Min 3.4V
Low-level output
Max 0.4V
Max 0.4V
Max 0.8V
Max 0.4V
Rise Time Tr
Max 1us
Max 1us
Max 1us
Max 200ns
Fall Time Tr
Max 1us
Max 1us
Max 1us
Max 200ns
Max Responding Frequency
300kHz
300kHz
300kHz
300kHz


